Récurérez et décomprimez l'archive IK.zip. Le programme représente une chaîne composée de deux objets, soumis à une contrainte de cinématique inverse.
1. Appuyez sur ESPACE pour animer. Comprenez ce que fait le programme (et comment il le fait).
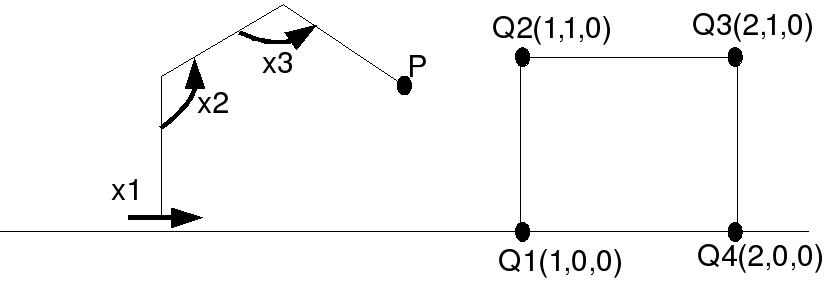
2. La figure suivante représente un robot à trois degrés de liberté. Il doit saisir un objet en Q1, puis l'amener à Q4 en passant par Q2 et Q3. Modélisez le robot, puis programmez ce scénario.
Références: om.pdf